Navigazione stimata (Dead Reckoning): come calcolare la posizione senza GPS
Navigazione stimata (Dead Reckoning): impara a calcolare la posizione senza GPS usando fix, velocità e direzione — tecniche pratiche e storiche per mare, aria e terra.
Il Dead Reckoning (o DR) è un metodo per stimare una posizione. È una parte importante della navigazione. Utilizza l'ultimo punto conosciuto (un fix), e la velocità e la direzione in cui il veicolo o la persona si è mossa da quando si trovava al fix, per fare una buona ipotesi su dove si trova la posizione attuale.
Si usa per tracciare dove si trova una nave o un aereo o, a volte, dove si trova un veicolo a terra. Ora, il Global Positioning System (GPS) è usato e la conta dei morti non è così importante. Ma viene ancora usato in aree dove il GPS non è disponibile o per brevi periodi di tempo se si perde un aggiornamento del GPS. È anche utile sapere nel caso in cui i satelliti GPS siano danneggiati da un'eruzione solare, o l'equipaggiamento sia perso o rotto, quindi viene ancora insegnato a marinai e piloti.
Il Ricongiungimento dei morti è il modo in cui i marinai hanno mappato il mondo dopo l'arrivo di Cristoforo Colombo nel Nuovo Mondo. Usando le stelle, potevano trovare la loro latitudine (distanza tra l'equatore e i poli). Ma prima di creare orologi precisi, non potevano dire la loro longitudine (quanto fossero lontani a est o a ovest) a meno che non vedessero una terra che conoscevano. Così, per attraversare gli oceani, hanno usato la contabilità morta. È anche così che Richard Byrd divenne la prima persona a volare al Polo Nord nel 1926. Fu in grado di volare per 16 ore e di tornare nel luogo che aveva lasciato, con sotto di sé solo campi di ghiaccio.
Galleria di immagini
3 Immagini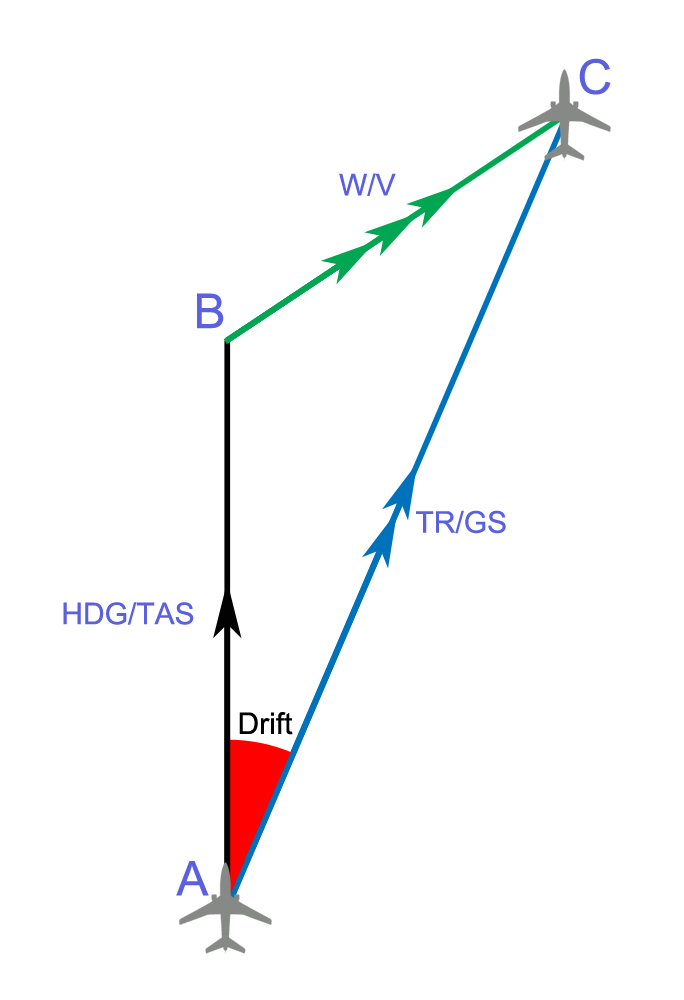


Come funziona il Dead Reckoning
Il principio è semplice: partendo da un punto noto (fix) si aggiorna la posizione conoscendo la distanza percorsa e la direzione di marcia. In forma elementare:
Posizione nuova = Posizione vecchia + distanza percorsa × vettore direzione
Dove la distanza percorsa è spesso calcolata come velocità × tempo. Per spostamenti su lunghe distanze o in navigazione geografica si usano calcoli su sfera (grandi cerchi) oppure proiezioni cartografiche per convertire bearing e distanza in latitudine/longitudine.
Strumenti e sensori usati oggi
- Inertial Measurement Units (IMU): accelerometri e giroscopi misurano accelerazioni e rotazioni; integrando si ottengono velocità e spostamenti.
- Odometry: nei veicoli terrestri o nei robot si usa il conteggio delle ruote (encoder) per stimare la distanza percorsa.
- Bussola/compasso: fornisce l'heading (direzione) magnetico.
- Speed log o sensori di velocità in mare e in aria.
- Sensor fusion: filtri di Kalman o algoritmi simili combinano IMU, odometria, bussola e occasionali fix GPS per migliorare la stima.
Errori e limiti
Il Dead Reckoning accumula errori nel tempo. Le principali fonti di errore sono:
- Bias e rumore dei sensori: gli accelerometri e i giroscopi hanno derive che, se integrate, crescono rapidamente.
- Scivolamento o derapaggio: nelle ruote, venti o correnti per navi e imprecisioni nel controllo dell'assetto.
- Approssimazioni geometriche: per grandi distanze la conversione direzione/distanza in lat/long richiede calcoli sferici; approssimazioni piatte introducono errore.
- Errore cumulativo: un piccolo errore nella stima della direzione o della velocità si somma continuamente e può portare a deviazioni significative.
Come ridurre l'errore
- Usare fix periodici (GPS, rilevamenti visivi, marcatori noti) per correggere la posizione stimata.
- Implementare la sensor fusion (es. filtro di Kalman) per combinare misure ridondanti e stimare bias.
- Usare map matching: confrontare la traiettoria stimata con mappe o vincoli ambientali per correggere scostamenti.
- Eseguire calibrazioni regolari dei sensori e controlli di qualità dei dati (rilevamento di outlier, scarti improvvisi).
Applicazioni pratiche
- Marina e aviazione: come backup quando il GPS non è disponibile; utile in aree polari o in guerra elettronica.
- Veicoli terrestri e robotica: odometria + IMU per navigazione autonoma in ambienti indoor o tunnel dove il GPS non arriva.
- Navigazione indoor: smartphone e dispositivi possono stimare posizione in edifici combinando step counting, bussola e sensori.
- Veicoli autonomi: Dead reckoning è parte dei sistemi di localizzazione, integrato con lidar, camere e mappe.
Brevi note storiche
Prima dei cronometri marini precisi, i navigatori determinavano la latitudine osservando le stelle, ma la longitudine rimaneva incerta finché non era possibile misurare il tempo con precisione. Il Dead Reckoning fu quindi fondamentale per la navigazione oceanica fino al XVIII secolo e rimase pratica comune anche dopo. L'esempio di grandi esplorazioni dimostra come, con metodi di stima della direzione e della distanza, si potesse ritornare a un punto di partenza anche su oceani o banchi di ghiaccio — sebbene alcune imprese storiche presentino ancora discussioni tra gli storici sulle tracce esatte dei percorsi.
Conclusione
Il Dead Reckoning è una tecnica semplice nel principio ma complessa nell'attuazione: utile come metodo di backup e come componente fondamentale dei moderni sistemi di navigazione. Comprendere le sue fonti di errore e le tecniche di compensazione (calibrazione, fusion di sensori, fix periodici) è essenziale per ottenere stime affidabili quando il GPS non è disponibile.

Metodo
Il calcolo dei morti inizia da un punto noto (il fix). Poi bisogna conoscere la velocità del veicolo. Nei vecchi tempi, le navi gettavano un tronco sul fianco (legato ad una corda) e contavano quanto tempo ci voleva per passare questo tronco (o per tirare una corda con i nodi e contare quanti nodi venivano tirati fuori in un certo lasso di tempo). Questo darebbe la velocità della nave. Conoscere la direzione da una bussola darebbe la direzione. Da questi due numeri si potrebbe fare una stima (una buona ipotesi) sulla posizione attuale del veicolo. Tuttavia, un vento spinge il veicolo su un lato (chiamato deriva), quindi anche questo deve essere misurato. Inoltre ci sono correnti nell'acqua, anche in mezzo all'oceano. Nel corso del tempo anche questo potrebbe commettere errori, per cui sono stati fatti dei grafici per correggere le correnti.
Gli aerei possono misurare facilmente la loro velocità del vento (quanto velocemente attraversano l'aria), ma non quanto velocemente si muovono sulla terraferma (chiamata velocità al suolo). Un vento in testa, in coda o trasversale cambia la velocità al suolo. Se l'altitudine dell'aereo è nota, allora la velocità al suolo può essere trovata cronometrando quanto velocemente l'aereo passa davanti ad un oggetto a terra. (Più si è in alto, più lento sembra che il terreno si muova). Una finestra sul pavimento dell'aereo può essere usata per trovare la velocità al suolo e la deriva dell'aereo.
Un veicolo a terra può anche usare il calcolo a morte. Di solito non devono preoccuparsi della deriva dal vento, e non ci sono correnti sulla terraferma, quindi questo calcolo è più facile.
Domande e risposte
D: Che cos'è il Dead Reckoning?
R: Il Dead Reckoning (o DR) è un metodo per stimare una posizione utilizzando l'ultimo punto conosciuto, la velocità e la direzione del movimento.
D: Per cosa si usa il Dead Reckoning?
R: Il Dead Reckoning viene utilizzato per tracciare la posizione di una nave, di un aereo o di un veicolo.
D: Perché il Dead Reckoning non è più così utilizzato?
R: Il sistema di posizionamento globale (GPS) viene ora utilizzato per la navigazione, rendendo il Dead Reckoning meno importante.
D: In quali situazioni il Dead Reckoning è ancora utile?
R: Il Dead Reckoning è utile nelle aree in cui il GPS non è disponibile o per brevi periodi di tempo se manca un aggiornamento GPS.
D: Perché è importante conoscere il Dead Reckoning?
R: Conoscere il Dead Reckoning è importante nel caso in cui i satelliti GPS vengano danneggiati o l'attrezzatura venga persa, in modo che i marinai e i piloti possano continuare a navigare.
D: Come hanno fatto i marinai a mappare il mondo dopo l'arrivo di Cristoforo Colombo nel Nuovo Mondo?
R: I marinai utilizzavano il Dead Reckoning e le stelle per trovare la loro latitudine e mappare il mondo.
D: Come ha fatto Richard Byrd a diventare la prima persona a volare fino al Polo Nord?
R: Richard Byrd ha utilizzato il Dead Reckoning per volare al Polo Nord nel 1926, volando per 16 ore e tornando al luogo da cui era partito, con solo campi di ghiaccio sotto di lui.
Articoli correlati
Autore
AlegsaOnline.com Navigazione stimata (Dead Reckoning): come calcolare la posizione senza GPS Leandro Alegsa
URL: https://it.alegsaonline.com/art/25956
Fonti
- deadreckoning.com : "Reckoning Aviation Navigation"
- belfortinstrument.com : "How Byrd Navigated to the North Pole"
- ship468.org : "Sea Scout Ship, Navigation"